Project 01
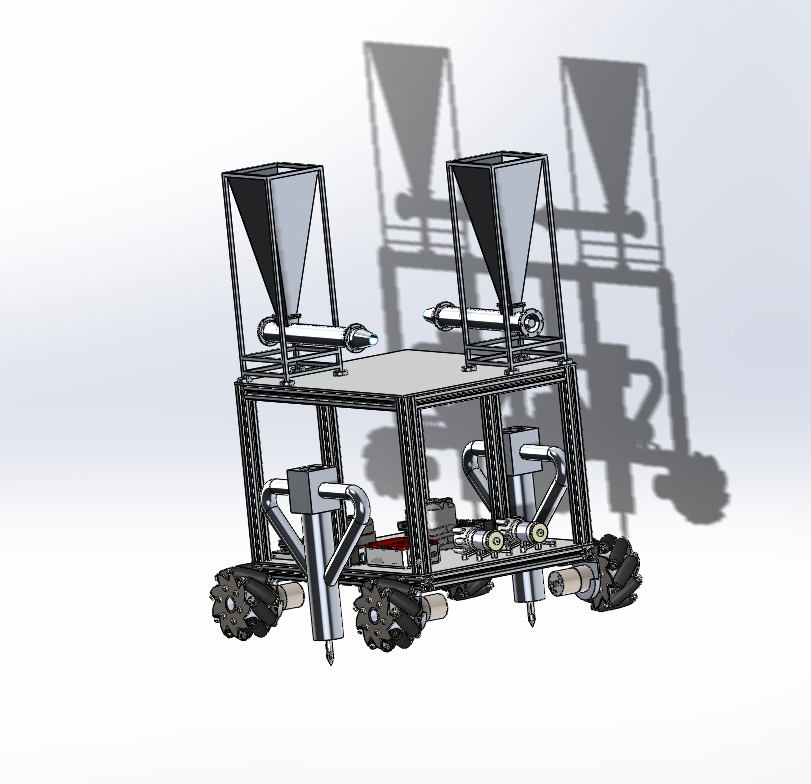
500kg Unmanned Ground Vehicle
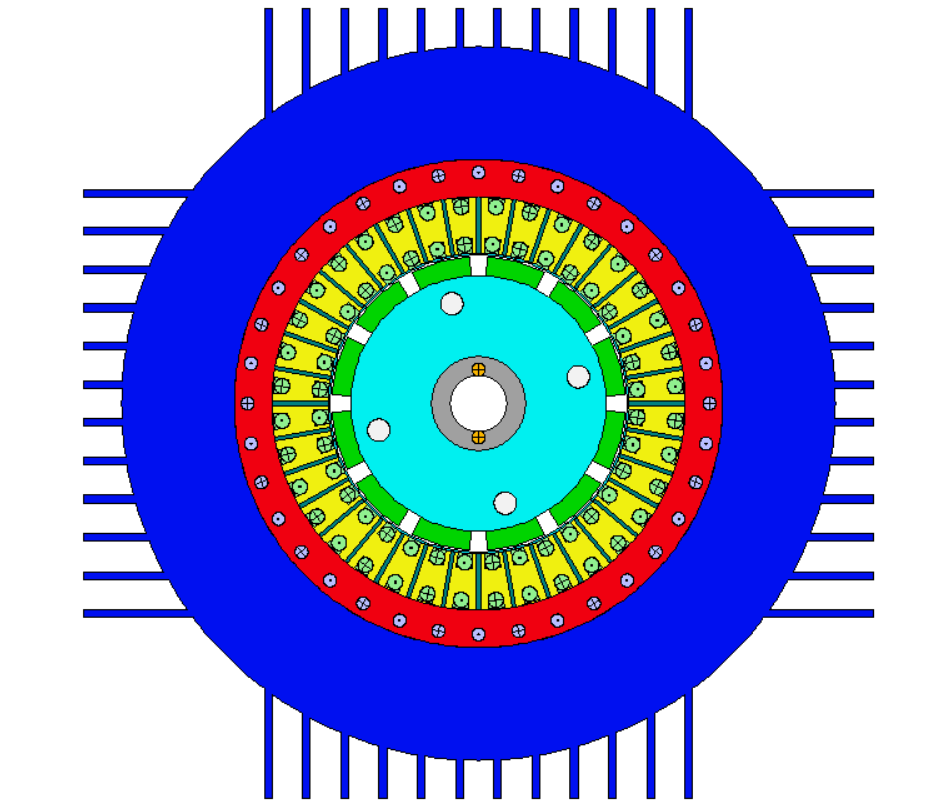
University team project — a 500kg tracked vehicle that drives itself. I handled the motor design in Ansys MotorCad, wrote the autonomous navigation code in ROS, built the WiFi communication layer with ESP32 and WebSockets, and made a Next.js dashboard to control and monitor it remotely.
Ansys MotorCadNext.jsROSESP32WebSocket
See the details