TURNAVTOL UAV.
A 23 kg vertical take-off and landing surveillance UAV with custom-designed motors, encrypted communications, real-time AI target detection, and a TinyML-powered dynamic motor optimization system.
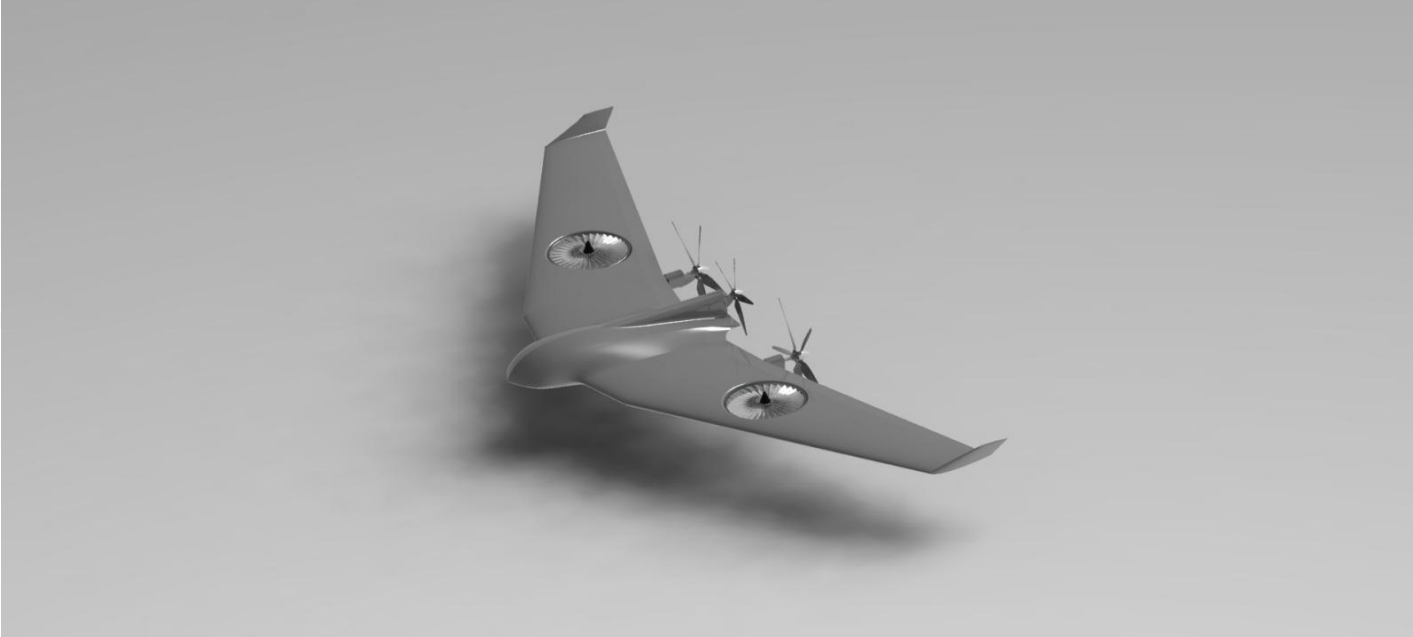
Vertical transition.
Takes off vertically using wing-embedded motors, then transitions to horizontal cruise. Built light, built strong.
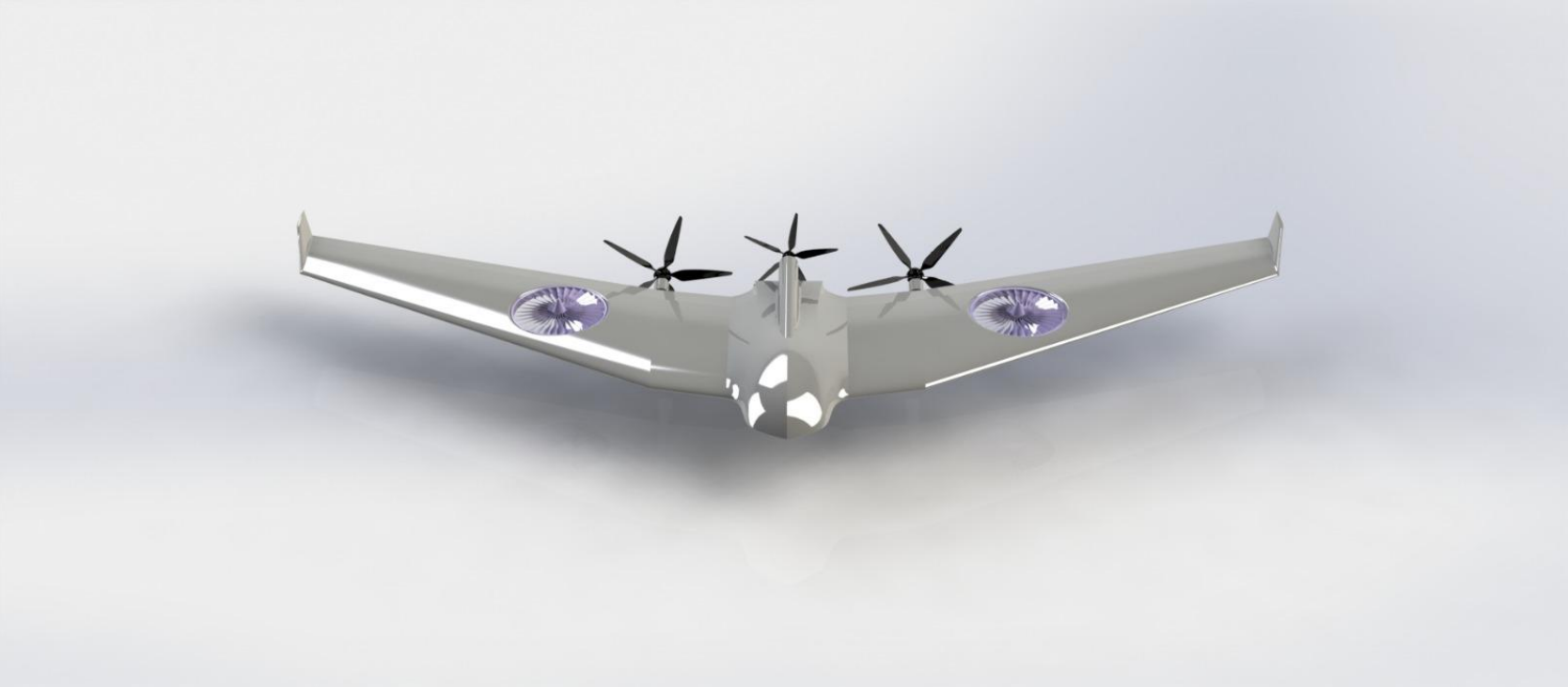
TURNA is a VTOL-type unmanned aerial vehicle designed for surveillance missions. It takes off and lands vertically using motors embedded in the wings, then transitions to horizontal flight for cruise. The telescopic landing gear retracts flush into the body to keep the aerodynamics clean during flight and deploys for landing on any surface.
The airframe is made from PEEK (Polyaryletherketone) and carbon fiber — extremely light but strong enough for the mission profile. With a wingspan of 2.57 meters and a takeoff weight of about 23 kg, it's designed to carry a full sensor payload while maintaining enough endurance for extended operations.
What makes this project interesting isn't just the airframe — it's the stack underneath. Custom motor designs, encrypted comms, real-time AI running on a Jetson, and a TinyML model that dynamically optimizes motor power.
Systems & Integration.
Every major subsystem — from motor electromagnetics to AI inference — was designed and implemented from scratch.
Custom Propulsion
Three different motor types, designed from scratch using Ansys RMxprt and validated with Maxwell FEA. Wing-embedded VTOL motors are Interior Permanent Magnet BLDCs producing 15.8 kg thrust each.
CV Pipeline
YOLOv10-B running on the Jetson Orin's NPU — 5.74ms inference latency, 19.1M parameters. When fast tracking is needed, the system automatically switches to KCF tracking at 348 FPS average.
Encrypted Comms
The comm system uses RSA for client authentication and ECDH (Elliptic Curve Diffie-Hellman) for session key exchange. The private key only exists on the UAV at launch.
TinyML Optimization
A 25-neuron RNN model dynamically optimizes motor power in real-time to conserve momentum. Trained on experimental flight data and achieves 99.27% R² accuracy. Runs directly on the flight controller.
Ground Station
Video feed, telemetry, GPS position, and manual override controls — all transmitted over a secure channel. Authentication happens via public/private key exchange before any data flows.
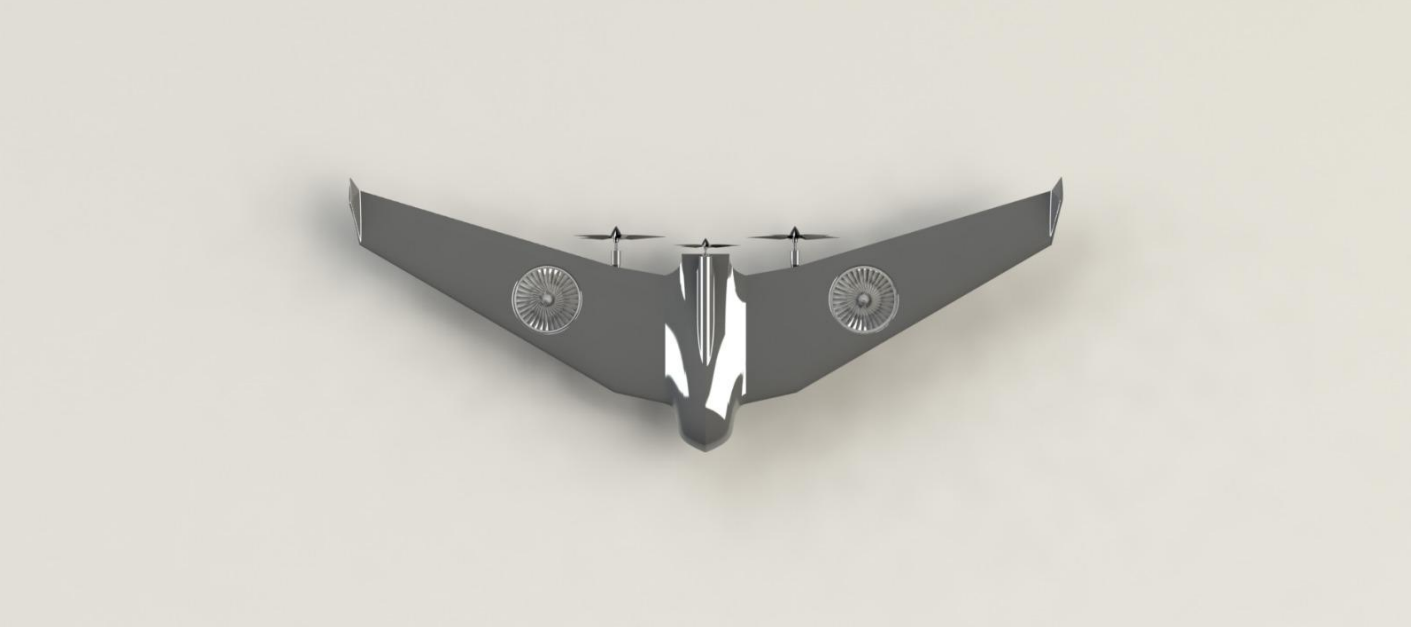
Airframe Design
Built with PEEK (Polyaryletherketone) and carbon fiber. Telescopic spring-loaded landing gear retracts flush into the body during flight to maintain aerodynamic cleanliness.
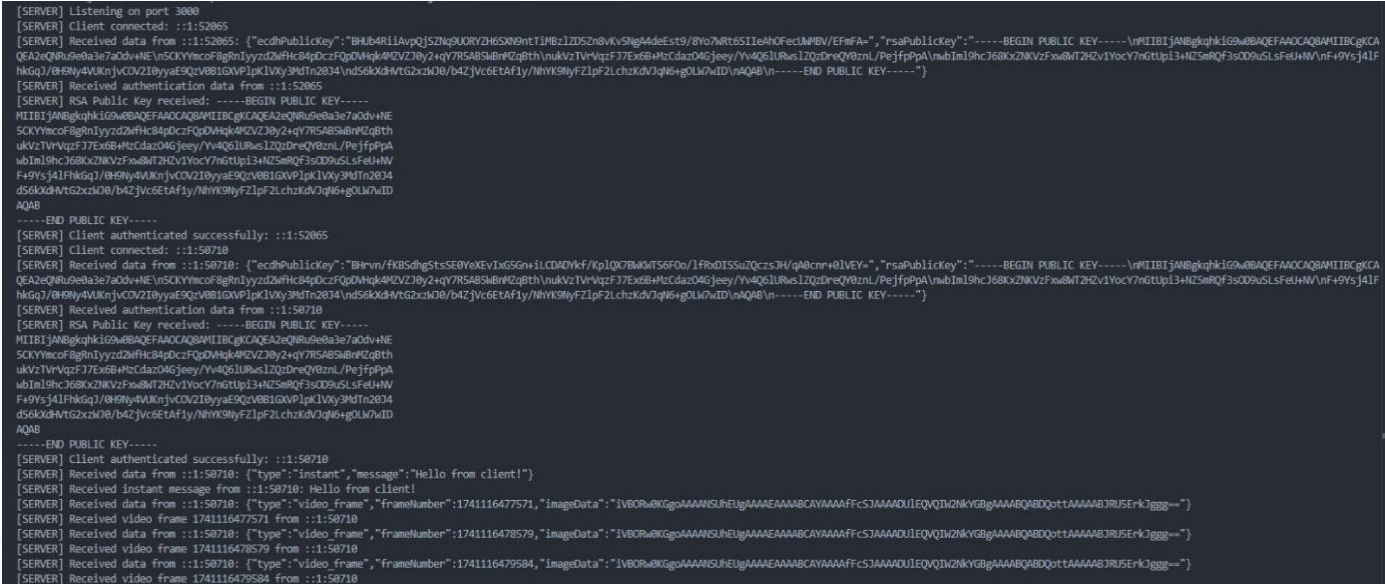
Encrypted Comms.
Not just a radio link. Full RSA authentication and ECDH session key exchange before any data flows.
The communication between TURNA and the ground station isn't just a radio link — it's a full cryptographic pipeline. Before any data flows, the UAV authenticates itself using RSA public/private key exchange. The private key only exists on the physical UAV and is loaded before takeoff.
Once authenticated, ECDH (Elliptic Curve Diffie-Hellman) generates a shared session key without either side revealing their secrets. All telemetry, control commands, and video are encrypted with this key. Even if someone intercepts the packets, they can't read or inject commands.
- /01RSA authentication — only authorized clients connect
- /02ECDH key exchange — no secrets transmitted over the air
- /03Full encryption — telemetry, commands, and video
AI & TinyML.
YOLOv10 running on the Jetson Orin for detection. TinyML RNN running on the flight controller for motor optimization.
Target Detection
YOLOv10-B runs on the Jetson Orin's NPU for real-time object detection. The model is trained on military datasets to recognize targets, zones, and objects of interest. At 5.74ms per frame with 19.1M parameters, it's fast enough for real-time surveillance at flight speed.
For dogfight scenarios where fast tracking beats re-detection, the system dynamically switches to KCF tracking — averaging 348 FPS on test footage.
TinyML Motor Control
Instead of fixed throttle curves, TURNA uses a 25-neuron RNN model running directly on the flight controller to dynamically optimize motor power. The model conserves momentum during transitions and maneuvers — making the UAV more energy-efficient and responsive than rule-based approaches.
Trained on experimental flight data collected by our team, the model achieves 99.27% R² accuracy on motor speed prediction. No cloud required — it runs at the edge with zero latency.
Building intelligent
airframes.
This project combines aerodynamic design, custom motor engineering, encrypted real-time communications, edge AI, and TinyML — all in a 23 kg airframe. Let's talk if you're working on something similar.