TERRAGENESIS.
An autonomous ground robot that navigates rough terrain to plant and water seeds — turning land that's too difficult to farm by hand into productive ground using LiDAR and ROS.
Farming the unfarmable.
Traditional farming equipment can't handle steep slopes or rocky terrain. We built an autonomous platform that can.
There's a lot of land around the world that could be farmed but isn't — because the terrain is too steep, too rocky, or too remote for traditional farming equipment. Sending people to plant seeds by hand on these slopes is expensive, slow, and often dangerous.
Terra Genesis is an autonomous ground robot designed to solve this. It navigates rough terrain on its own, digs holes, plants seeds, and waters them — all in a single pass, with no human on the ground. An operator monitors the mission remotely through a mobile app.
My Role
- /01ROS navigation stack development
- /02System integration (LiDAR + GPS + motors)
- /03Path planning & obstacle avoidance
- /04Communication architecture
- /05Field testing & debugging
Six integrated systems.
From terrain mapping with LiDAR to automated seed planting and watering.
ROS Navigation Stack
The robot runs on ROS (Robot Operating System) for autonomous navigation. I worked on the navigation stack — path planning, obstacle avoidance, and waypoint following. The vehicle plans routes through uneven terrain and adjusts in real time.
LiDAR Obstacle Mapping
An on-board LiDAR sensor scans the terrain continuously, building a local map and detecting obstacles — rocks, ditches, trees. The robot avoids them autonomously without any human guidance, even in areas with no GPS signal.
Automated Planting System
The mechanical planting system digs, drops seeds, and covers them — all automated. The robot follows a pre-planned grid pattern to maximize coverage and seed spacing. Each planting action is logged with GPS coordinates.
On-board Watering
After planting, the vehicle provides initial watering to each seed location. The water system is controlled by the same autonomy stack, so the robot plants and waters in a single pass without returning to base.
Mobile Control App
A custom mobile application connects to the robot via GSM, showing live GPS position, mission progress, battery status, and planting statistics. The operator can start missions, set waypoints, and monitor from anywhere.
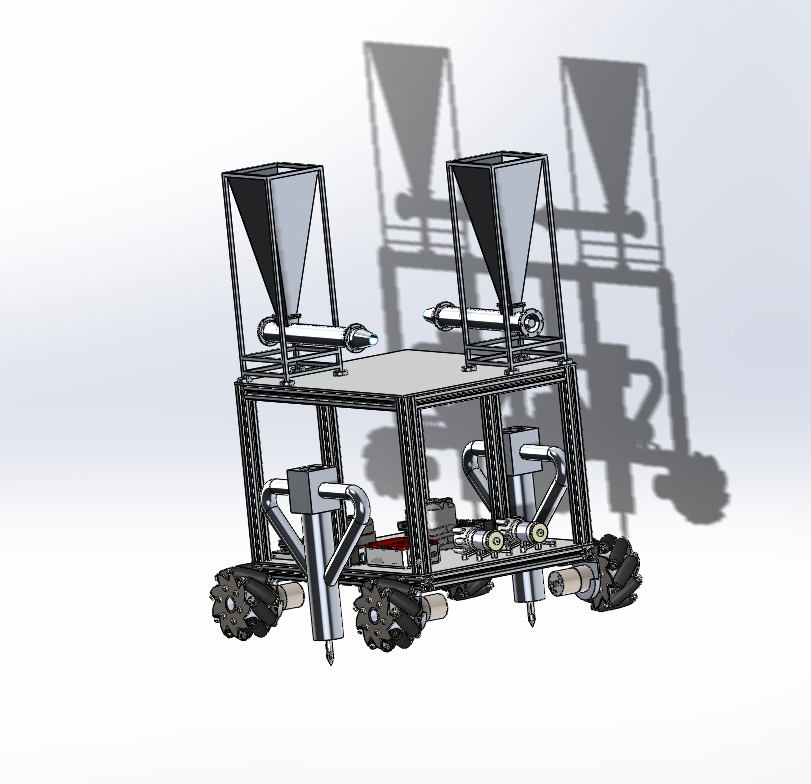
Mechanical Design
The chassis and planting mechanism were designed in Solidworks and stress-tested in Ansys. The all-terrain platform handles slopes and rough ground that would be impossible to farm with conventional equipment.
Mission Flow.
From mission start to completed planting — a single autonomous pass monitored remotely.
Set Mission
Operator defines the planting area boundaries and seed type via the mobile app. The robot calculates optimal grid spacing.
Navigate
LiDAR maps the terrain in real-time. The ROS nav stack plans a path through obstacles, adjusting for slopes and rough ground.
Plant & Water
At each waypoint, the mechanism digs, drops a seed, covers it, and provides initial watering. GPS logs the exact location.
Report
The mobile app shows live progress, total seeds planted, area covered, and remaining battery. Full mission log saved.
Robotics meets
agriculture.
This project combines autonomous navigation, mechanical design, embedded systems, and mobile app development — all focused on solving a real problem. If you're working on agricultural robotics or related challenges, let's connect.